LED Controller for FPV Racing
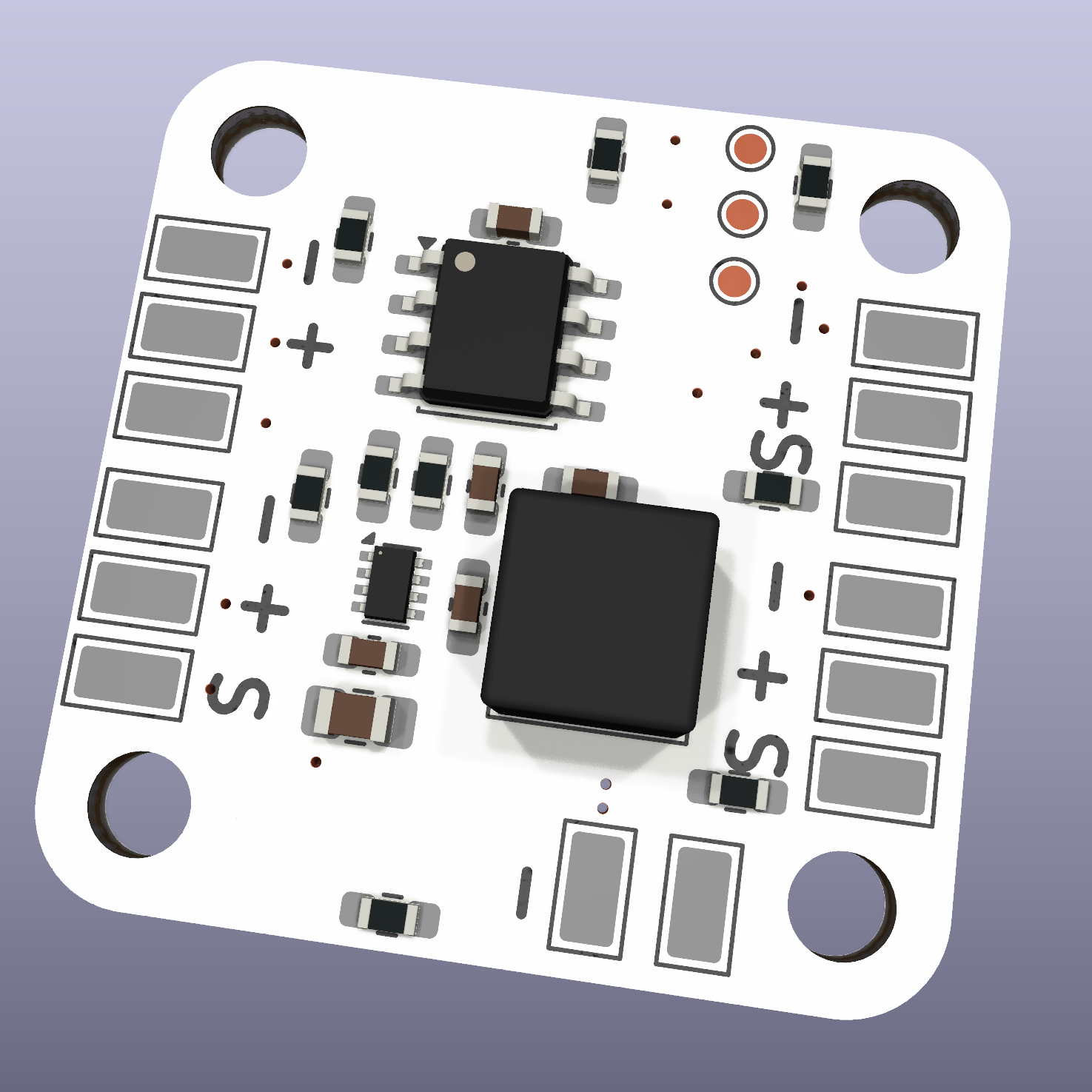
Most FPV races are held after dark, and it is often mandatory to have LEDs on all four arms. These LEDs typically utilize the WS2812B protocol. Currently, most off the shelf solutions use a separate board to connect the LEDs, featuring a physical button to cycle through colors and patterns. Since none of these are in stock across India at the moment, I decided to design my own. I chose the ATtiny202 as my microcontroller and paired it with a TI TPS62933 buck converter to handle input voltages from 3S to 6S batteries. Initially, I designed the PCB to fit a traditional 20mm x 20mm drone racing stack, but I no longer think that is the most optimal layout. Modern racing frames compress the stack height as much as possible; adding an extra board simply isn't feasible or ideal. I plan to revisit the design once I discover a better mounting solution. That is the primary reason I haven't sent it to fabrication yet. Designing this taught me how simple most consumer electronics truly are. I was able to select components that kept the manufacturing cost for 10 units below the retail price of commercial alternatives, such as those from HGLRC. Plus, I achieved this using a much more versatile MCU like the ATtiny, rather than a generic industrial MCU with the part numbers laser-etched off.